TIMBER JOINT DEVELOPMENT
—
Design research
London, United Kingdom
2020

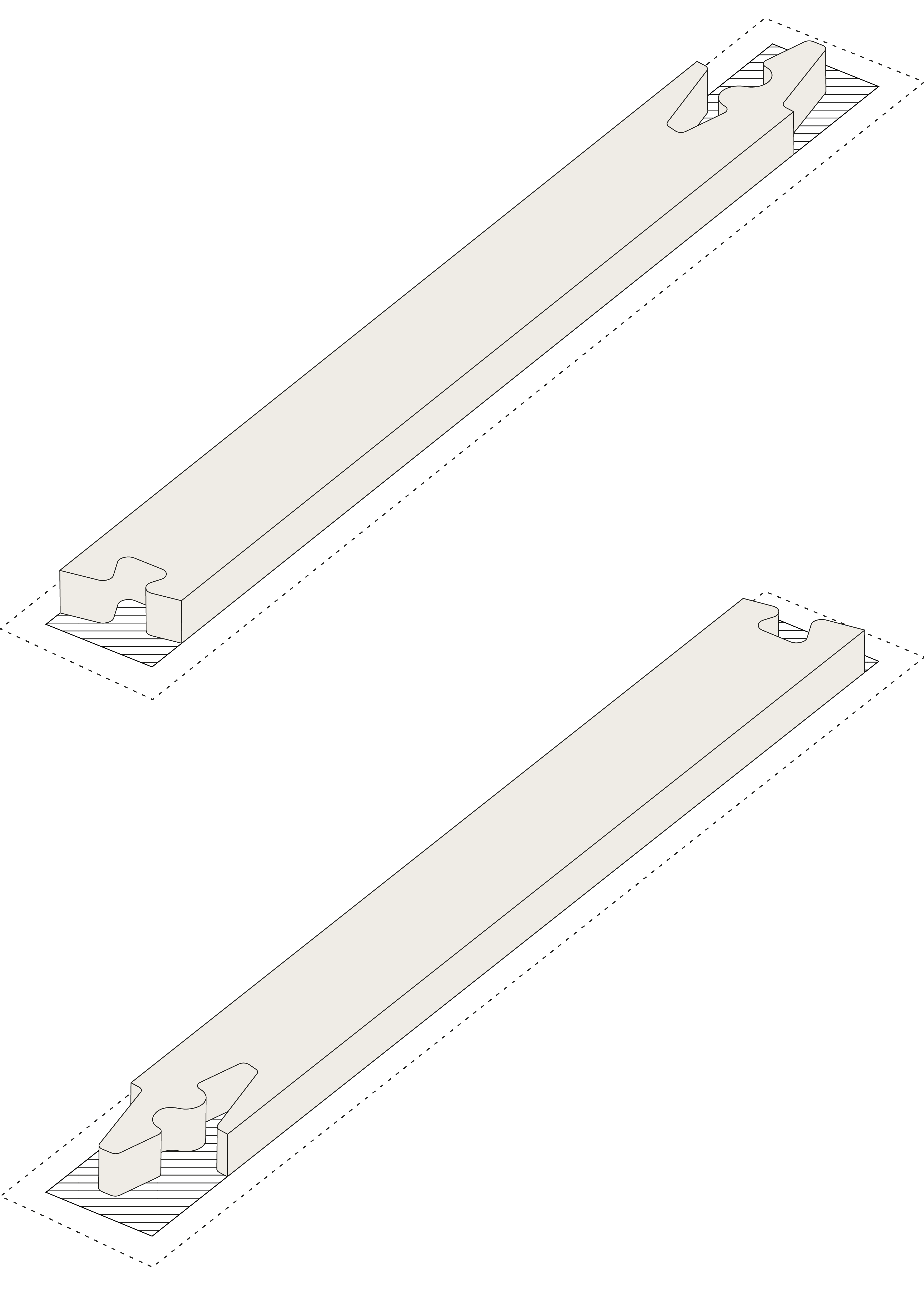
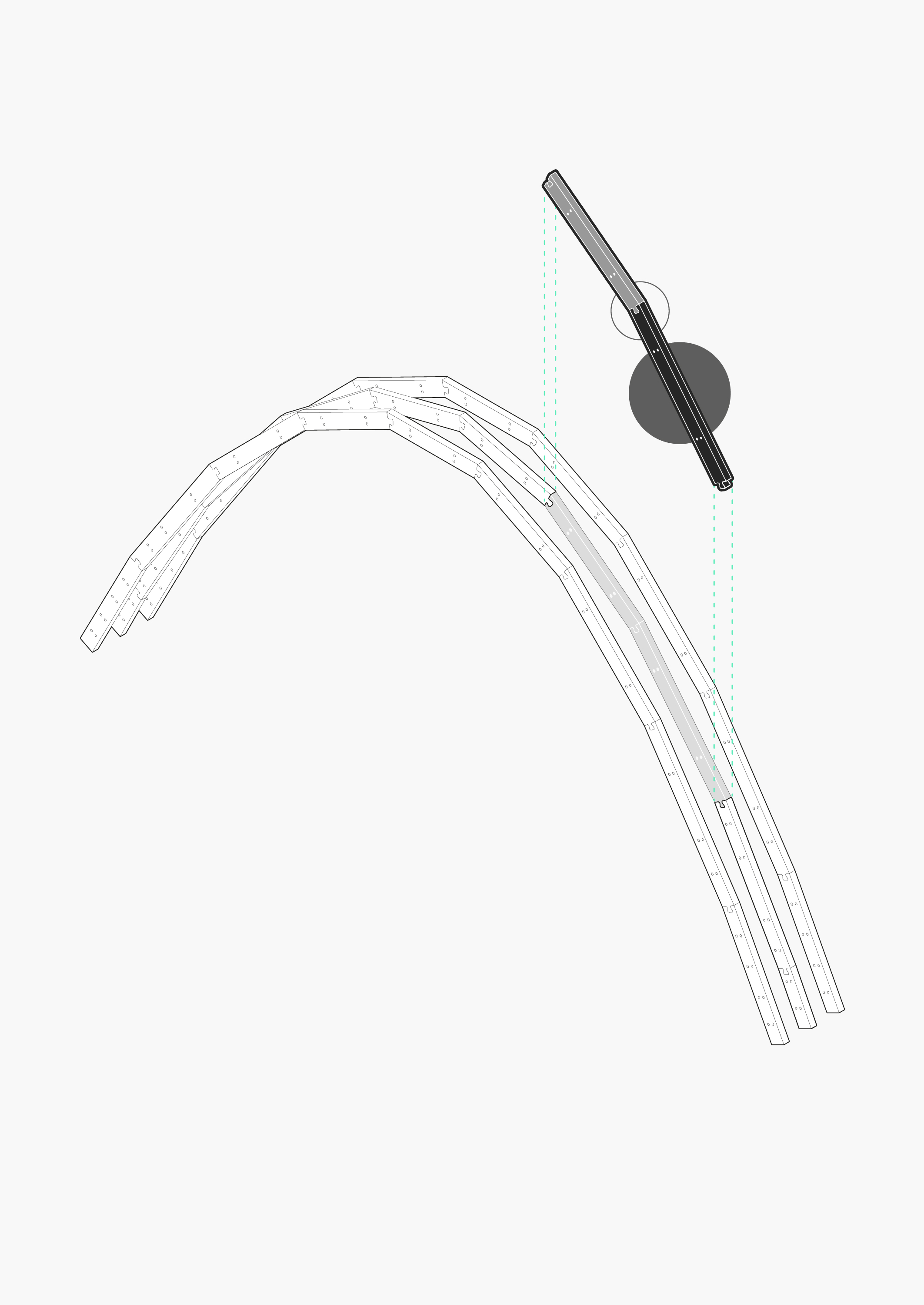
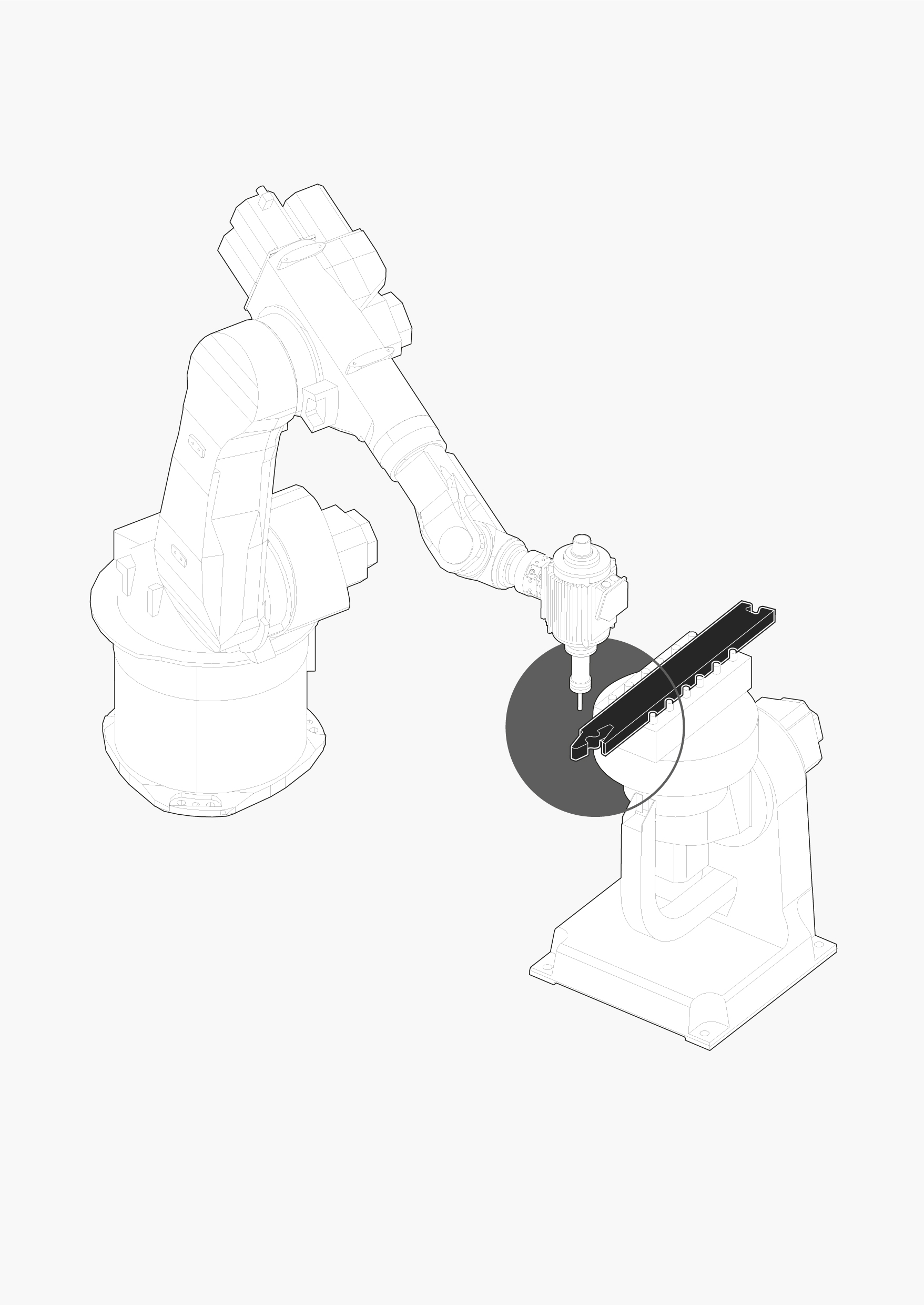
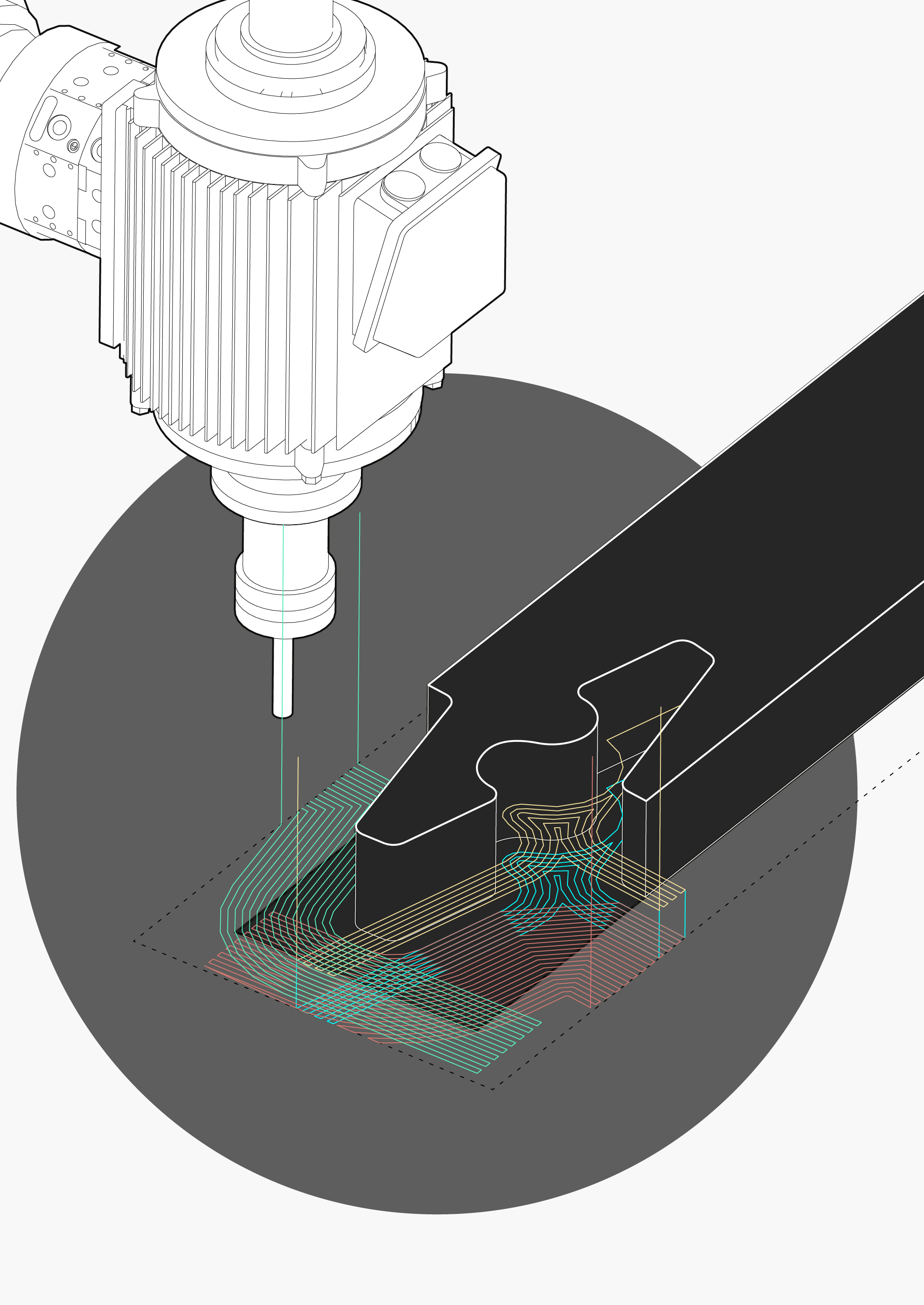
A new designed timber joint, developed for robotis machining. It allows to join two timber beams at their short ends and is optimised between material mass, orientation and tool diameters. A digital script creates a toolpath that can adapt to multiple parameters such as different cross-sections, tools or strength.
Development of the joint

Overview of the different versions